ORE Catapult, October 2019
The third ORCA Hub demonstrations took place on 3rd October at the National Renewable Energy Centre in Blyth, Northumberland.
During the day the ORCA Hub team carried out a series of demonstrations aligned to a scenario centred on offshore operations. The morning session focussed around routine inspections of assets similar to those found offshore while the afternoon session centred on inspections of those assets when site faults or concerns are detected. The demonstrations showed subsea, ground-based and aerial robots carrying out tasks in different areas around the ORE Catapult facility which mimicked the offshore environments in which the technology could be used.

Beginning the day in the "control room" the Human-Robot Interaction team led by Prof. Helen Hastie demonstrated routine inspections in simulation using Gazebo. The team covered their ongoing work on:
- planning visualisation
- monitoring of cognitive load
- MIRIAM chat-based interface with Gazebo
- emergency response using the Furhat
- 3D vision using Hololens

Having shown routine inspections in simulation within the operations room, the University of Oxford team then demonstrated 3D mapping of the 3MW facility and inspection of an asset using ANYmal. Dr Ioannis Havoutis presented the team's path planning research live on the ANYmal showing the robot navigating using a map of the facility (top right). The blue areas denote free space while the red are constrained space.
In the images below ANYmal can be seen navigating within the industrial structure using its laser sensor to navigate accurately and pointing a thermal camera to inspect a point of interest. The team have also developed an operator interface to command ANYmal which also shows navigation markers (bottom left). Videos and further details of these demonstrations are available here.

The Heriot-Watt University team used the wheeled Husky robot to demonstrate practical self-certification methodology as part of an offshore inspection mission. During the mission, Husky used Frequency Modulated Continuous Wave (FMCW) radar to detect rust on the surface of an asset while digital twin technology was used to interract with the robot and visualise any failures detected.

Using one of the large outdoor tanks, the subsea team from Heriot-Watt University led by Prof. Yvan Petillot demonstrated an ROV performing a smart visual survey of structures submerged in the tank. Dr. Rahul Mourya also gave a demonstration of an underwater acoustic sensor network for remote monitoring of subsea assets.

During the afternoon the University of Edinburgh team led by Dr. Michael Mistry demonstrated their ANYmal navigating obstacles in order to carry out an inspection task using a thermal camera.

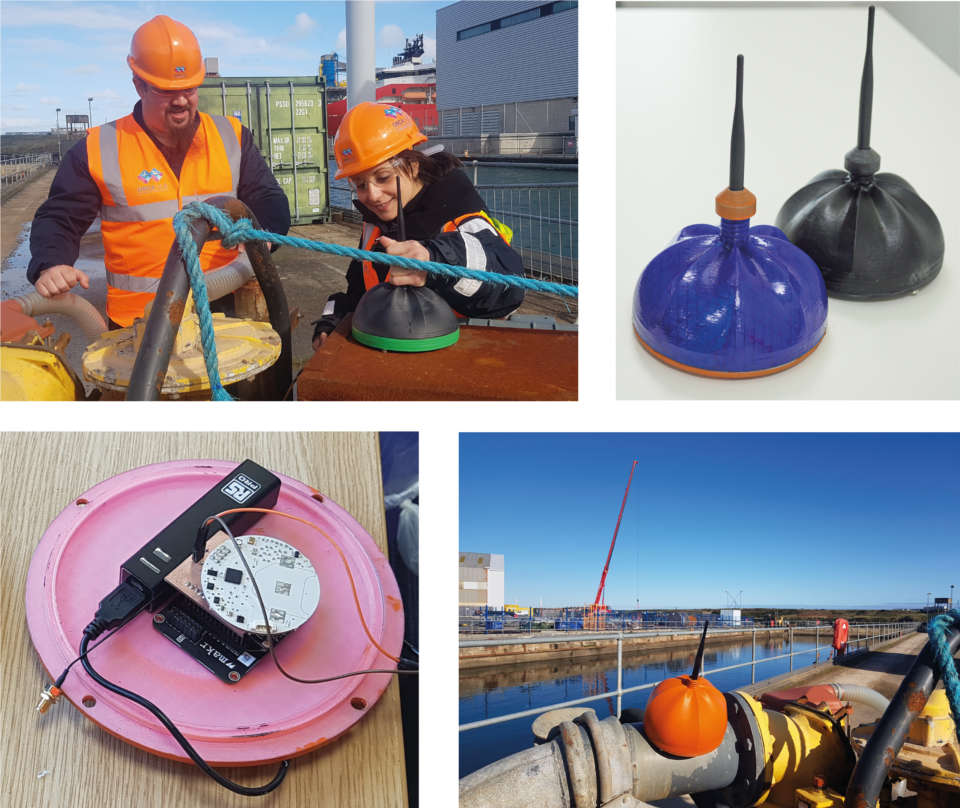
The University of Edinburgh School of Engineering team deployed their Limpet sensor nodes around the site to monitor structures and transmit data in real time via LoRA which our industry visitors were able to see displayed in the new dashboard. The team were also using Limpets constructed using a new tailored adhesion method and waterproof encapsulation.
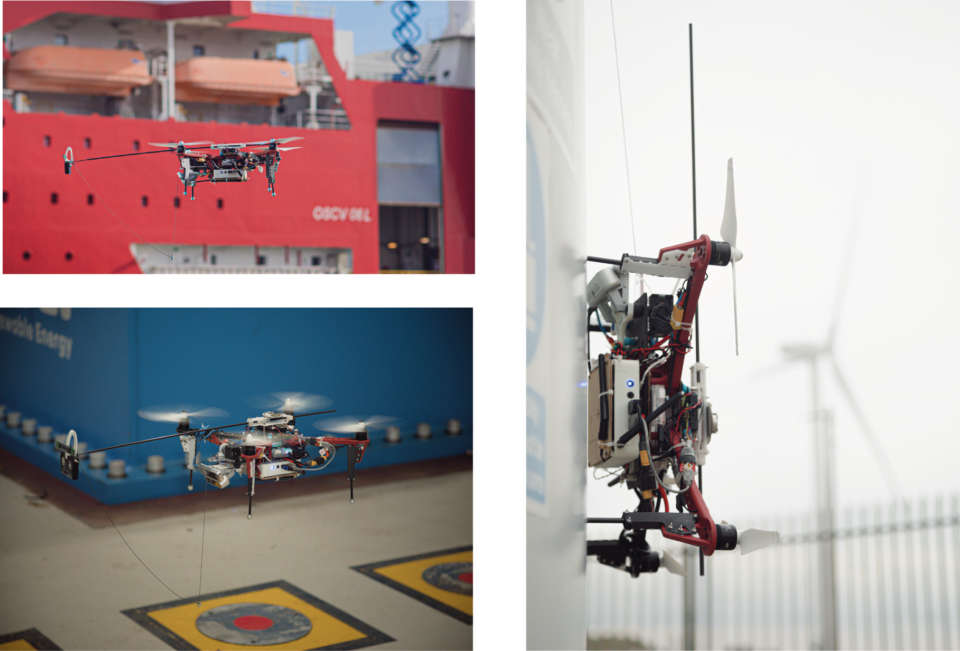
An Imperial College London team led by Dr. Mirko Kovac also demonstrated autonomous UAV sensor placement using drones equipped with a winch-tethered magnet and passive wheels capable of perching on and sliding along both vertical and horizontal surfaces. Equipped with sensors and cameras, the drones were then able to carry out an on-surface inspection.

A combined team from Imperial College London and the University of
Edinburgh used a Non-Destructive Evaluation (NDE) sensor combined with a
precise robotic manipulator to carry out an inspection to evalutate
wall thickness and to look for cracks and other material weaknesses. The data from the scan created a material defect map for the operator during the inspection.